Manual
Login
Our 3D CAD supplier models have been moved to 3Dfindit.com, the new visual search engine for 3D CAD, CAE & BIM models.
You can log in there with your existing account of this site.
The content remains free of charge.

Top Links
Manual
 |
-
Wechseln Sie in den Konfigurationsmodus in PARTdataManager und überprüfen Sie, welche Regel die Verbindung zwischen den beweglichem Teilen darstellt – beispielsweise zwischen Zylinder und Kolben. Öffnen Sie die Regel.
-
Im Dialogbereich Positionierung muss das Auswahlkästchen Translation „Frei“ aktiviert sein und die Min- und Max-Werte müssen entsprechend der physikalischen Begrenzungen des "realen" Produkts spezifiziert werden. (Hier im Beispiel geht es um eine Translation -Bewegung der Kolbenstange.)
-
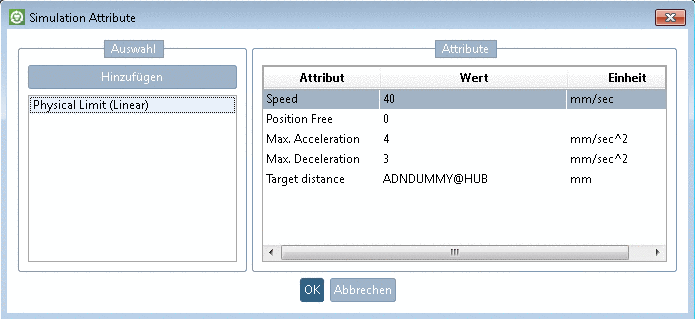
Wählen Sie Actuator > Actuator Linear > Physical Limit (Linear) und bestätigen Sie mit .
-> Die entsprechenden Attribute werden im Dialogfenster angezeigt.
-
Bestimmen Sie die Werte der Attribute entsprechend dem realen Produkt.
Im Kontextmenü eines geöffneten Feldes finden verschiedene hilfreiche Funktionen zur Auswahl des Wertes:
Optional können zusätzlich Bewegungsprofile gesetzt werden, um eine dynamische Bewegung auszuführen (beispielsweise gegeben durch Bewegungsdiagramme in den originalen Produktdaten.) In diesem Fall klicken Sie erneut und wählen dann Actuator > Actuator Linear > Diagram Time Position.
Bestimmen Sie dann die Werte nach folgendem Muster. (Beliebig viele Eingabepaare sind möglich.)
Zeit,Position;Zeit,Position;etc.
0,0;2,2.5;4,7.5;6,15;8,25;10,40
Es können auch mehrere Bewegungsprofile zugefügt werden, wenn unterschiedliche Diagramme mit verschiedenen Lasten beispielsweise zur Verfügung stehen. Sie können diese später einzeln im Mechatronik Concept Designer verwenden. Um sie von einander unterscheiden zu können, können Sie im Dialogfenster eine Beschreibung zufügen.
Klicken Sie im Konfigurator Menü auf Konfiguration speichern.
Das Bauteil ist nun fertig für den Export zum Testen. Siehe unten.





![[Hinweis]](/community/externals/manuals/%24%7Bb2b:MANUALPATH/images/note.png)